








Robot Mobile Apprentissage ROS2 Limo Cobot Agilex
5.169,99 € TTC
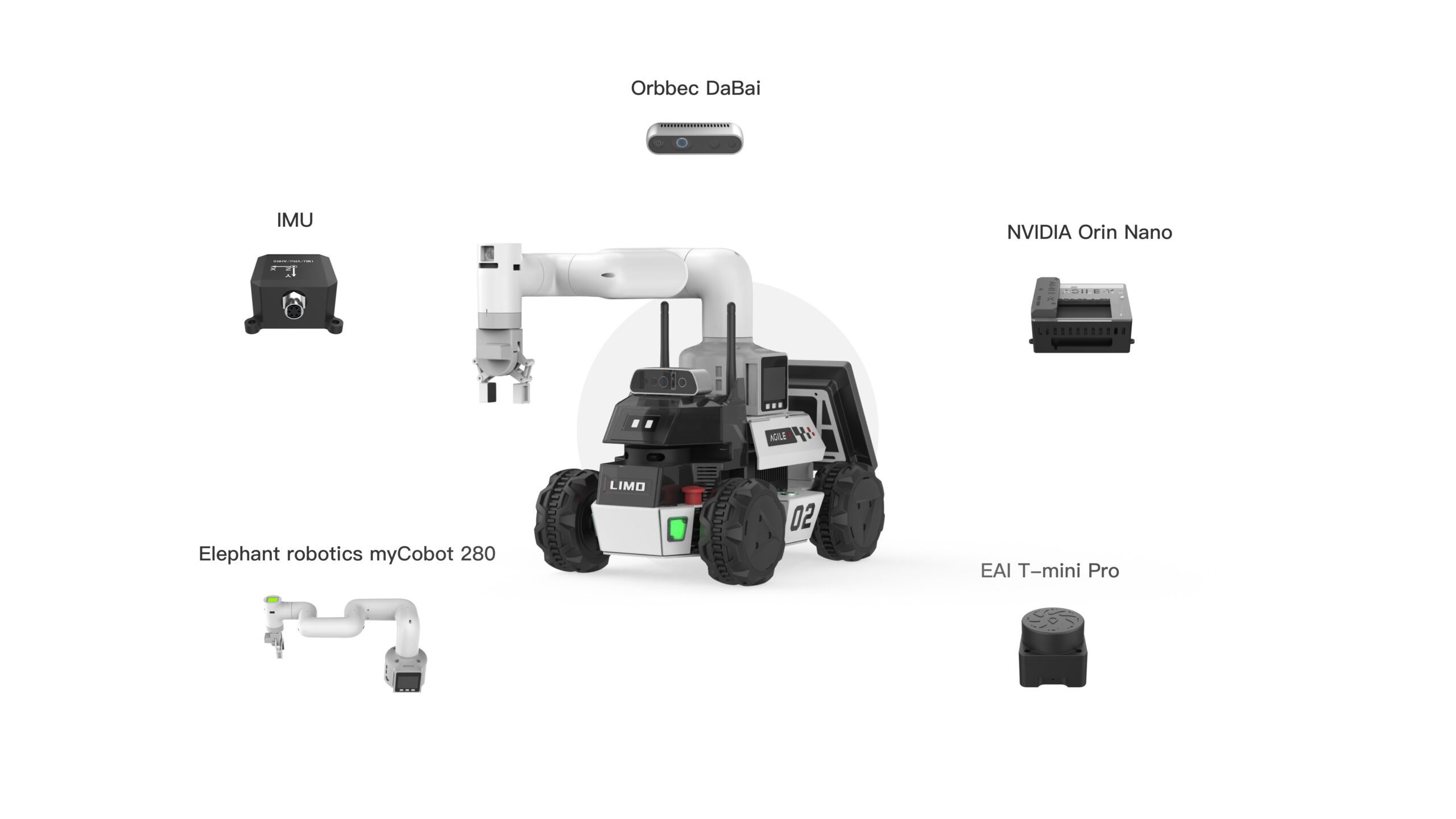
LIMO Cobot intègre Mycobot 280 M5 et Nvidia Orin Nano pour des fonctionnalités autonomes. Il prend en charge la navigation, l’évitement des obstacles, la cartographie, la compréhension mobile et la reconnaissance visuelle. Il est idéal pour l’éducation, les compétitions et la formation.
Description
Le mode de direction différentielle à quatre roues de LIMO facilite la conduite sur n’importe quelle surface. Qu’il s’agisse de routes en béton lisse ou de sable, elle fonctionne bien. Cette flexibilité est bénéfique pour les développeurs qui recherchent diverses applications.
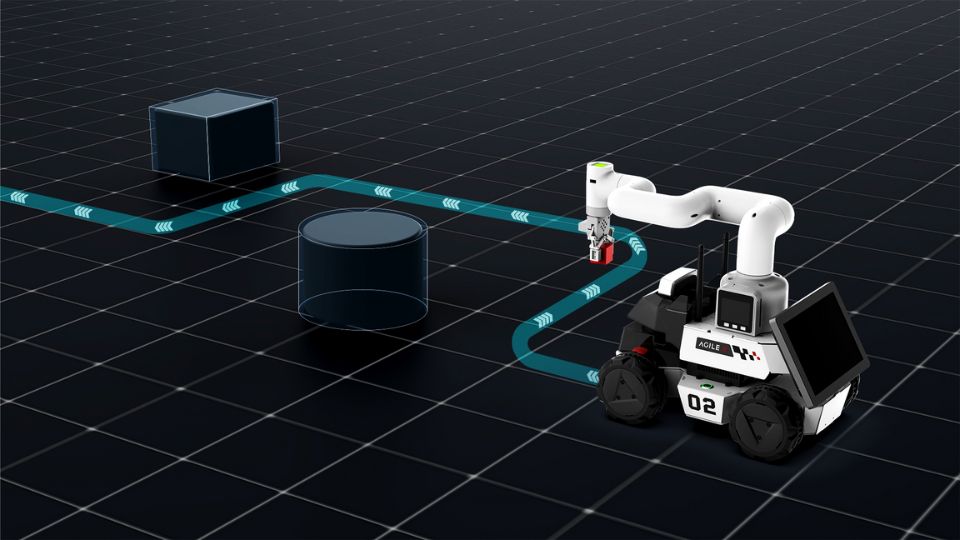
Saisie mobile
LIMO Cobot dispose d’un bras robotique 6-DoF prenant en charge divers effecteurs finaux, permettant une préhension mobile précise pour répondre à diverses exigences de tâches

Cartographie autonome
LIMO Cobot détecte et construit de manière autonome des cartes environnementales précises, offrant un support précis des données pour naviguer dans des espaces complexes.

Évitement des obstacles
LIMO Cobot peut percevoir intelligemment son environnement environnant et naviguer avec souplesse pour éviter les obstacles, assurant ainsi une exécution sûre des tâches.
Prise en charge de l’Open Source
Prend en charge les plates-formes ROS et Gazebo, compatibles avec les langages de programmation grand public comme Python et C++. Encourage les utilisateurs à développer ou à développer des applications de robotique, des présentations et des exemples de code, simplifiant ainsi le processus d’enseignement et d’apprentissage

Informations complémentaires
| Connexions | |
|---|---|
| Charge supp. sur bras (kg) | |
| Poids (kg) | |
| Nombre d'axes | |
| Capteurs | Capteur d'unités de mesure inertielle (IMU), Capteur détection d'obstacle, LIDAR, SLAM 3D, SLAM Visuel |
| Type de Navigation | |
| Rayon de braquage (mm) | |
| Accessoires | |
| Hauteur (mm) | |
| Largeur (mm) | |
| Profondeur (mm) | |
| Image & Vidéo | |
| Fonctions de Sécurité | |
| Langages de programmation | |
| Systèmes d'exploitation | |
| Nombre de roues | |
| Nationalité | |
| Couleurs | |
| Crédit Photo | |
| Etat / Production | |
| Fournisseur | |
| Dernière Mise à Jour |
Produits similaires



Robot Logistique Stock
Base mobile robot AGV AMR Logistique activeONE Convoyeur Active Space Automation


Robot Logistique Stock
Base mobile robot AGV AMR Logistique CarryBee Très bas Aichikikai Techno System Co