












Robot Base mobile AGV AMR autonome open source ROSbot 2R HUSARION
4.370,99 € TTC
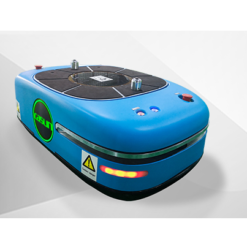
ROSbot 2R est une plateforme robotique autonome open source basée sur le Raspberry Pi 4 (ARM64). De plus, il dispose d’une plateforme de développement et de ressources en ligne gratuites telles que des tutoriels, des manuels ou un modèle de simulation, ce qui le rend idéal pour créer des prototypes et apprendre à programmer des véhicules autonomes. Les options système sont disponibles dans ROS et ROS 2.
Description
ROSbot 2R est une plateforme robotique autonome open source basée sur le Raspberry Pi 4 (ARM64). De plus, il dispose d’une plateforme de développement et de ressources en ligne gratuites telles que des tutoriels, des manuels ou un modèle de simulation, ce qui le rend idéal pour créer des prototypes et apprendre à programmer des véhicules autonomes. Les options système sont disponibles dans ROS et ROS 2.
Intégre :
- CPU : Broadcom BCM2711 64-bit, Quad-Core ARM Cortex-A72, 1.5 GHz (ARM64, Raspberry Pi 4)
- GPU : Broadcom VideoCore VI
- RAM : 4GB LPDDR4
- IMU : BNO055 (accéléromètre + gyroscope)
- Capteur de distance : VL53L0X (temps de vol)
- Réseaux : LAN sans fil 802.11b/g/n/ac 2,4 GHz et 5 GHz
- Plate-forme mobile à 4 roues avec moteurs à courant continu
- Batteries Li-on : 3 x 3500 mAh (avec circuits de protection)
- Panneau arrière avec interfaces pour modules supplémentaires
- Châssis robuste en aluminium
- Caméra RGBD : Orbbec Astra
- LIDAR : Slamtec RPLIDAR A2

L’ensemble contient :
- ROSbot 2R
- Chargeur dédié
- Adaptateur USB Ethernet
- Étui en aluminium
Informations complémentaires
| Hauteur (mm) | |
|---|---|
| Largeur (mm) | |
| Profondeur (mm) | |
| Charge utile (kg) | |
| Vitesse en avant max (m/s) | |
| Autonomie (h) | |
| Batteries (V / mAh) | |
| Types de Batteries | |
| Sol / Surface / Revêtement | |
| Motorisations & Transmissions | |
| Connexions | |
| Capteurs | Capteur d'unités de mesure inertielle (IMU), Capteur de distance, Capteur détection d'obstacle, LIDAR, SLAM 2D |
| RAM (Go) | |
| Image & Vidéo | |
| Langages de programmation | |
| Fonctions de Sécurité | |
| Nombre de roues | |
| Matériaux | |
| Accessoires | |
| Nationalité | |
| Couleurs | |
| Etat / Production | |
| Crédit Photo | |
| Fournisseur | |
| Dernière Mise à Jour |
Produits similaires

Robot Logistique Stock
Base mobile robot AGV AMR Logistique CarryBee Dolly DB Aichikikai Techno System Co



Robot Logistique Stock
Base mobile robot AGV AMR Logistique CarryBee Dolly Chargement Aichikikai Techno System Co
