








Robot Recherche Salamandra robotica EPFL
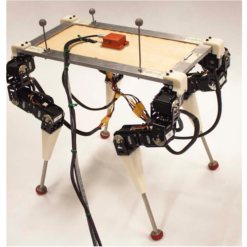
Salamandra robotica II, la nouvelle génération de notre robot amphibie ressemblant à une salamandre. Le robot est décrit dans un article publié dans IEEE Transactions
contacter leobotics pour un devis robot de recherche salamandra
Description
Ce nouveau robot nage plus de deux fois plus vite, est équipé de membres pliables et embarque des microcontrôleurs plus puissants qui permettent le calcul distribué de nos modèles de réseaux neuronaux de la moelle épinière ainsi que la simulation des propriétés musculaires. C’est l’un des rares robots, si ce n’est le seul, qui peut nager, ramper et marcher.
Sa conception modulaire
Changer rapidement sa morphologie (par exemple, l’allonger, ajouter ou retirer des jambes, etc.). De plus, sa modularité signifie que chaque module a son propre microcontrôleur, batterie et moteurs, et que nous pouvons donc diviser le robot en différentes parties et il fonctionnerait toujours. Cela peut avoir des implications intéressantes en termes de robustesse contre les dommages. Par exemple, le robot pourrait perdre des parties de son corps et être toujours capable de marche
Le but principal de ce robot
Servir d’outil scientifique pour tester des hypothèses sur les circuits neuronaux sous-jacents à la locomotion dans la moelle épinière des animaux vertébrés. Pour cela, nous travaillons avec des neurobiologistes, en particulier le professeur Jean-Marie Cabelguen de l’Université de Bordeaux, et nous établis des modèles des générateurs de modèles centraux qui sont connus pour contrôler la locomotion chez les animaux vertébrés. Ces circuits sophistiqués peuvent produire des schémas locomoteurs complexes tout en ne recevant que des signaux de commande simples des parties supérieures du cerveau.
Un deuxième objectif du robot est d’ouvrir la voie à des robots de service amphibies qui pourraient être utilisés pour des tâches d’inspection ou pour des missions de recherche et de sauvetage (par exemple après un tremblement de terre, une inondation ou une coulée de boue).
Produits similaires
Robot Jouet Educatif
Robot Educatif Makers et Recherche de Mace Robotics Robot MRPiZ mobile programmable

Robot Logistique Stock
Robot à roues recherche logistique déchargement palettes cartons Handle Boston Dynamics