













Robot à construire éducatif quadrupède Dogzilla S2 avec Raspberry Pi 4B 4GB Yahboom
1.529,00 € TTC
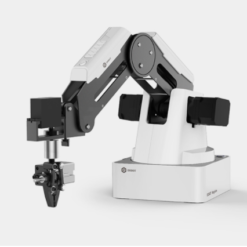
DOGZILLA est un chien robot IA visuel avec 12 degrés de liberté, principalement composé de 6 servos, de supports en alliage d’aluminium et d’un appareil photo. Il peut compléter de manière flexible une série d’actions bioniques et réaliser un mouvement omnidirectionnel et un contrôle d’attitude en six dimensions.
Description
Combiné à des algorithmes de cinématique inverse, réalise divers gaits de mouvement. Raspberry Pi comme contrôleur principal, avec des configurations supplémentaires telles que le lidar et le module vocal. Grâce à la programmation Python, basée sur le système Ubuntu 20.04 ROS2, de nombreuses fonctions telles que la reconnaissance visuelle de l’IA, la navigation par mappage lidar et le contrôle vocal peuvent être réalisées.

Caractéristiques :
- Peut marcher et se tordre comme un vrai chien.
- Équipé de 6 servomoteurs de haute précision, d’un corps en alliage d’aluminium sûr et non toxique et d’une caméra grand angle. S2 a ajouté des modules de lidar et d’interaction vocale.
- En utilisant le Raspberry Pi comme contrôleur, nous avons mis à niveau le système Ubuntu 20.04 ROS2 pour prendre en charge la programmation Python et la simulation RVIZ.
- Prise en charge de plusieurs méthodes de contrôle à distance telles que l’APP, la poignée, les pages Web, les claviers d’ordinateur et la navigation de cartographie APP.
- S1/S2 est facilement complété sur la base de ROS2 et OpenCV, avec des fonctions telles que la reconnaissance des étiquettes, la détection des visages, le suivi des cibles et la patrouille visuelle des lignes.
- S2 est livré avec un lidar et un module vocal intelligent, qui peut réaliser des fonctions telles que la cartographie de la navigation, l’évitement et le suivi du lidar, et le contrôle vocal.


Développé à l’aide du système ROS21
Le prédécesseur de ROS2 était ROS, qui est le système d’exploitation du robot. ROS lui-même n’est pas un système d’exploitation, mais une bibliothèque logicielle et un ensemble d’outils. ROS résout le problème de communication de divers composants de robots, et plus tard, de plus en plus d’algorithmes de robots sont intégrés dans ROS. ROS2 hérite de ROS, qui est plus puissant et excellent que ROS.
Navigation par cartographie SLAM(
S2 est équipé d’un lidar TOF haute performance, qui peut construire une carte en temps réel grâce à un balayage laser omnidirectionnel, percevoir avec précision les obstacles environnants et réaliser des fonctions dynamiques d’évitement, de garde, de patrouille, de suivi et d’autres fonctions.

12 articulations cinématiques DOF
DOGZILLA est équipé de 12 servos servo haute performance, et plusieurs pièces structurelles en alliage d’aluminium sont connectées pour former trois articulations du coude, de l’épaule et de la hanche sur chaque jambe, ce qui restaure vraiment la posture de mouvement des animaux quadrupèdes.

Naviguer dans la cartographie SLAM
L’arrière de DOGZILLA peut être équipé du lidar MS200 TOF, grâce à l’environnement, la numérisation laser à 360° peut compléter la fonction de navigation de cartographie SLAM.
Éviter les obstacles de navigation
DOGZILA peut utiliser le lidar laser, l’IMU et d’autres capteurs pour utiliser le cartographe pour le positionnement et réaliser la navigation et l’évitement d’obstacles.
Navigation sur la carte de l’application mobile
Contrôlez le chien robot via le téléphone portable pour réaliser la navigation de cartographie SLAM et la transmission d’images de la caméra.

Informations complémentaires
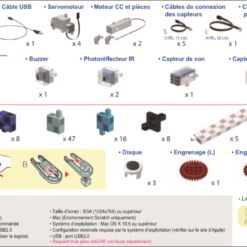
| Accessoires | 1x Carte 64G TF, 1x Couvercle en alliage d'aluminium (y compris l'appareil photo), 1x Pack de vis à colonne de cuivre, 1X Poignée sans fil, 1x support de téléphone portable |
|---|---|
| Nombre d'axes | |
| Motorisations & Transmissions | |
| Capteurs | Capteur détection d'obstacle, Cartographie 3D, LIDAR, Reconnaissance vocale |
| Types de Batteries | |
| Autonomie (h) | |
| Systèmes d'exploitation | |
| Langages de programmation | |
| Type de Navigation | |
| Fonctions & Avantages | |
| Ecrans | |
| Matériaux | |
| Poids (kg) | |
| Image & Vidéo | |
| Connexions | |
| Etat / Production | |
| Crédit Photo | |
| Fournisseur | |
| Dernière Mise à Jour |