











Robot humanoïde mouvement flexible plate-forme open source DARWIN-OP Robotis
DARWIN-OP est une plate-forme de robot humanoïde miniature abordable avec une puissance de calcul avancée, des capteurs sophistiqués, une capacité de charge utile élevée et une capacité de mouvement dynamique pour permettre de nombreuses activités de recherche et d’éducation passionnantes.
Contacter leobotics pour une offre robot humanoïde
Description
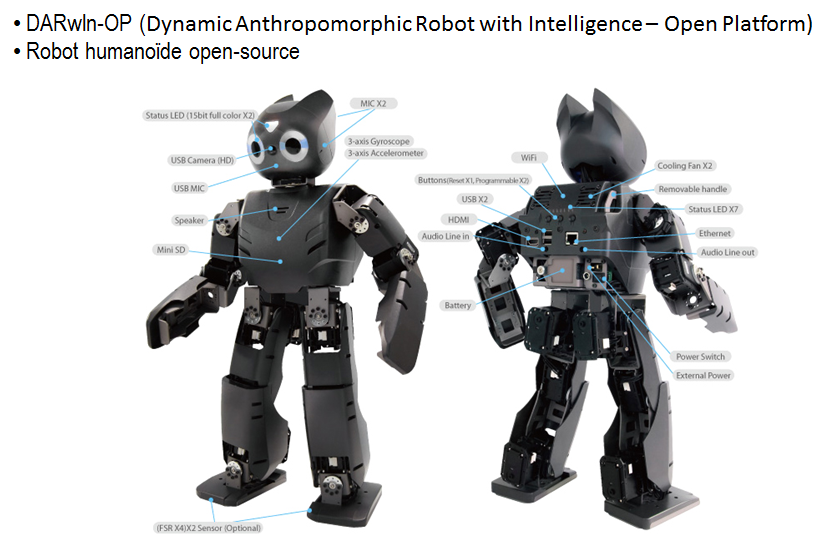
Qu’est-ce que DARWIN-OP ?
DARwIn-OP (Dynamic Anthropomorphic Robot with Intelligence-Open Platform) est une plate-forme de robot humanoïde miniature abordable avec une puissance de calcul avancée, des capteurs sophistiqués, une capacité de charge utile élevée et une capacité de mouvement dynamique pour permettre de nombreuses activités de recherche et d’éducation passionnantes.
Open source et plateforme complètement ouverte
La désignation “open source” s’applique aux logiciels dont la licence respecte des critères précisément établis par l’Open Source Initiative, c’est-à-dire la possibilité de libre redistribution, d’accès au code source et aux travaux dérivés.
La plateforme DARwIn-OP est complètement ouverte grâce à :
- sa base d’ordinateur PC fonctionnant avec le système d’exploitation Linux-Ubuntu ;
- des spécifications matérielles disponibles (carte électronique, modèle 3D) ;
- des spécifications logicielles disponibles (codes sources et kit de composant logiciel) ;
- des extensions possibles avec 13 entrées / sorties et un port analogique / digital ;
- une structure modulaire pour une maintenance aisée.
Haute performance et fonctionnalités avancées
- Vitesse de marche par défaut : 24,0 cm/s (9,44 in/s) 0,25 sec/pas – démarche modifiable par l’utilisateur
- •PC intégré : 1,6 GHz Intel Atom Z530 embarqué 4 Go flash SSD
- • Contrôleur de gestion (CM-730) : ARM CortexM3 STM32F103RE 72 MHz
- • 20 modules d’actionneur (6 jambes DOF x2+ 3 bras DOF x2 + 2 cous DOF)
- • Actionneurs avec engrenages métalliques durables (DYNAMIXEL MX-28)
- • Kit d’auto-entretien (étapes et instructions faciles à suivre)
- • Mode veille pour une faible consommation d’énergie
- • Bus Dynamixel haute vitesse de 3 Mbps pour le contrôle conjoint
- • Batterie (30 minutes de fonctionnement), chargeur et adaptateur secteur externe
- (La batterie peut être retirée du robot sans s’éteindre en branchant l’alimentation externe avant de le retirer)
- • Fonctionnalité polyvalente (peut accepter les périphériques hérités, actuels et futurs)
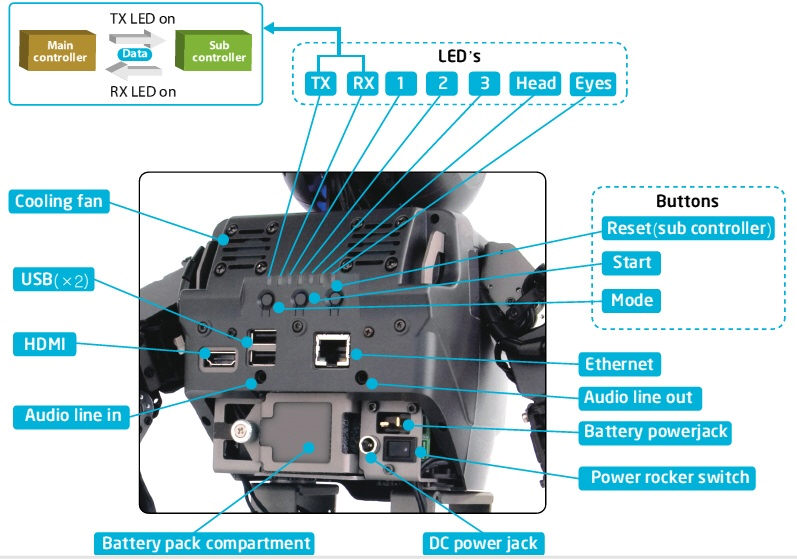
- • Gyroscope à 3 axes, accéléromètre à 3 axes, bouton x3, microphone de détection x2
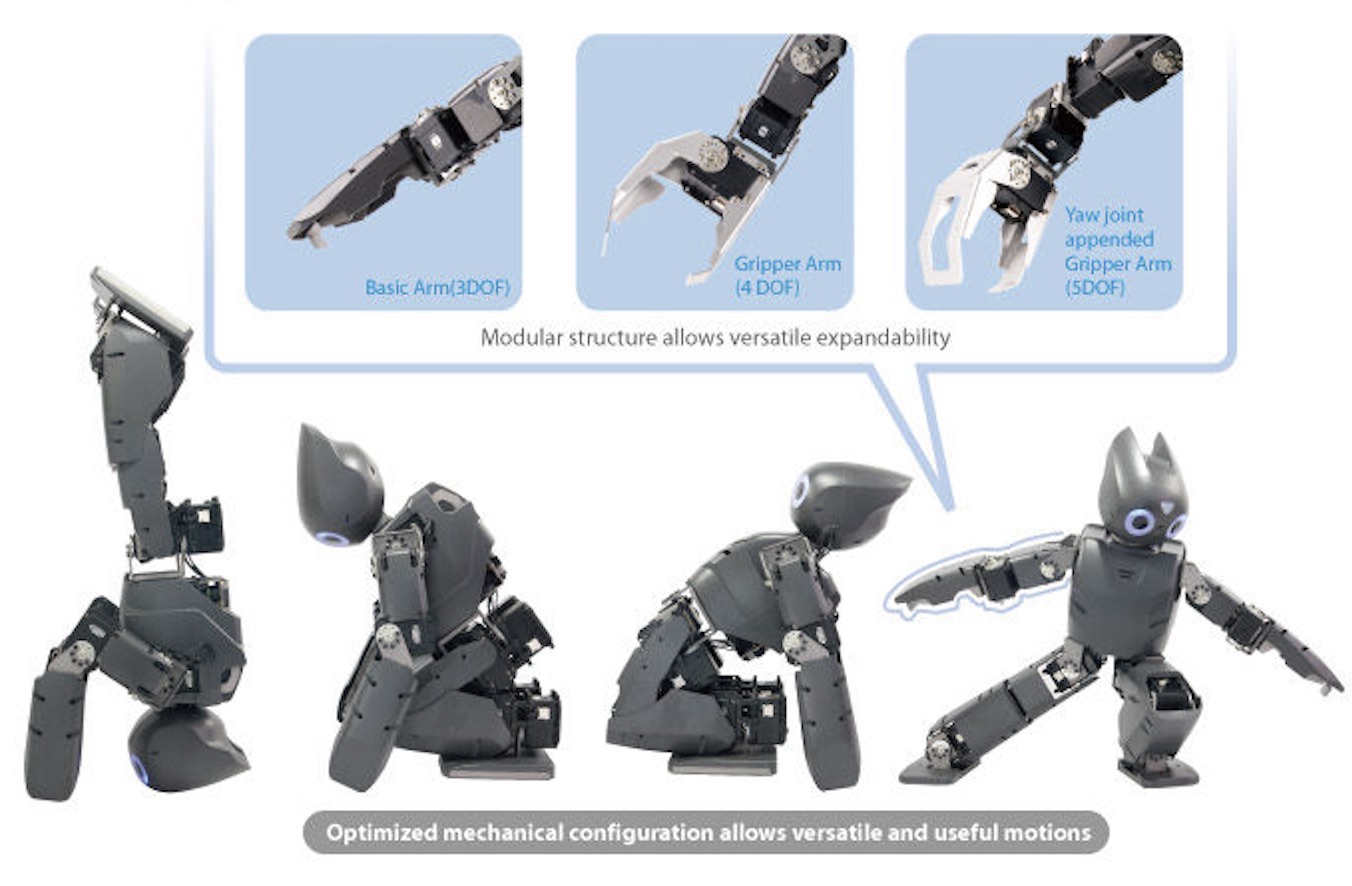
Configuration modulaire efficace et polyvalente
La structure modulaire permet une expansion polyvalente. La configuration mécanique optimisée permet un mouvement polyvalent et utile.
Contenu de l’emballage
- Robot DARWIN-OP entièrement assemblé
- 3 packs de piles
- 1 chargeur de batterie
- 1 Alimentation CC
- 1 câble d’alimentation
- 1 câble Ethernet
- 2 clés, 2 tournevis
- 1 jeu de câbles de rechange
- 1 jeu de boulons et d’écrous de rechange
- 1 boule rouge
- 1 jeu de patchs de couleur (7 individuels)
- 1 clé USB (avec logiciel de récupération installé)
- 1 guide de démarrage rapide
- 2 fusibles de rechange

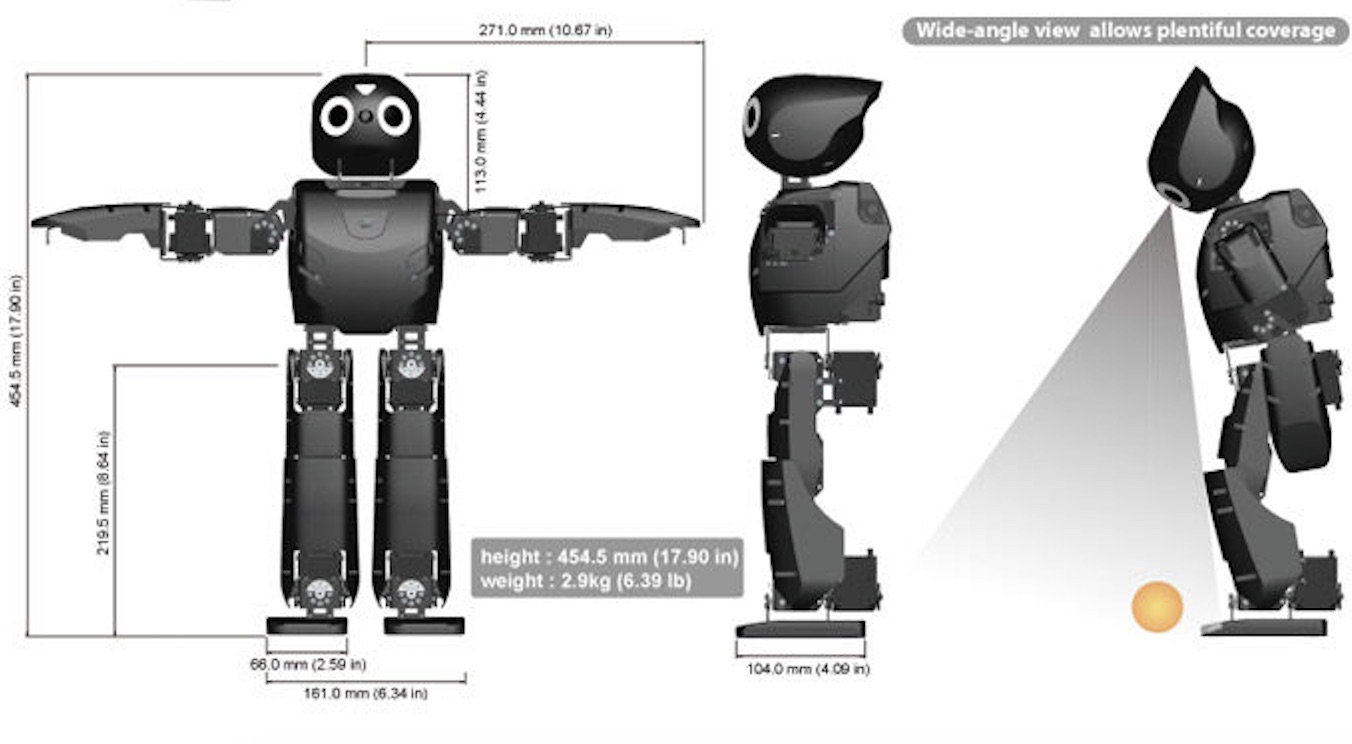
Dimensions et taille
Informations complémentaires
| Capteurs | |
|---|---|
| Hauteur (mm) | |
| Poids (kg) | |
| Connexions | |
| Fonctions de Sécurité | |
| Domaines d'application | |
| Type de Navigation / de Déplacement | |
| Microphones | |
| Voyants lumineux | |
| Nombre d'axes | |
| Batteries (V / mAh) | |
| Types de Batteries | |
| Accessoires | 1x chargeur CC, 1x Guide de démarrage, 2 clés, 2x Tournevis, 3 packs de piles |
| Autonomie (min) | |
| Motorisations & Transmissions | |
| Matériaux | |
| Nationalité | |
| Couleurs | |
| Etat / Production | |
| Crédit Photo | |
| Fournisseur | |
| Dernière Mise à Jour |
Produits similaires










Robot Construction Programmation
Robot de construction humanoïde main uHandbit Hiwonder micro:bit programmable apprentissage IA









