










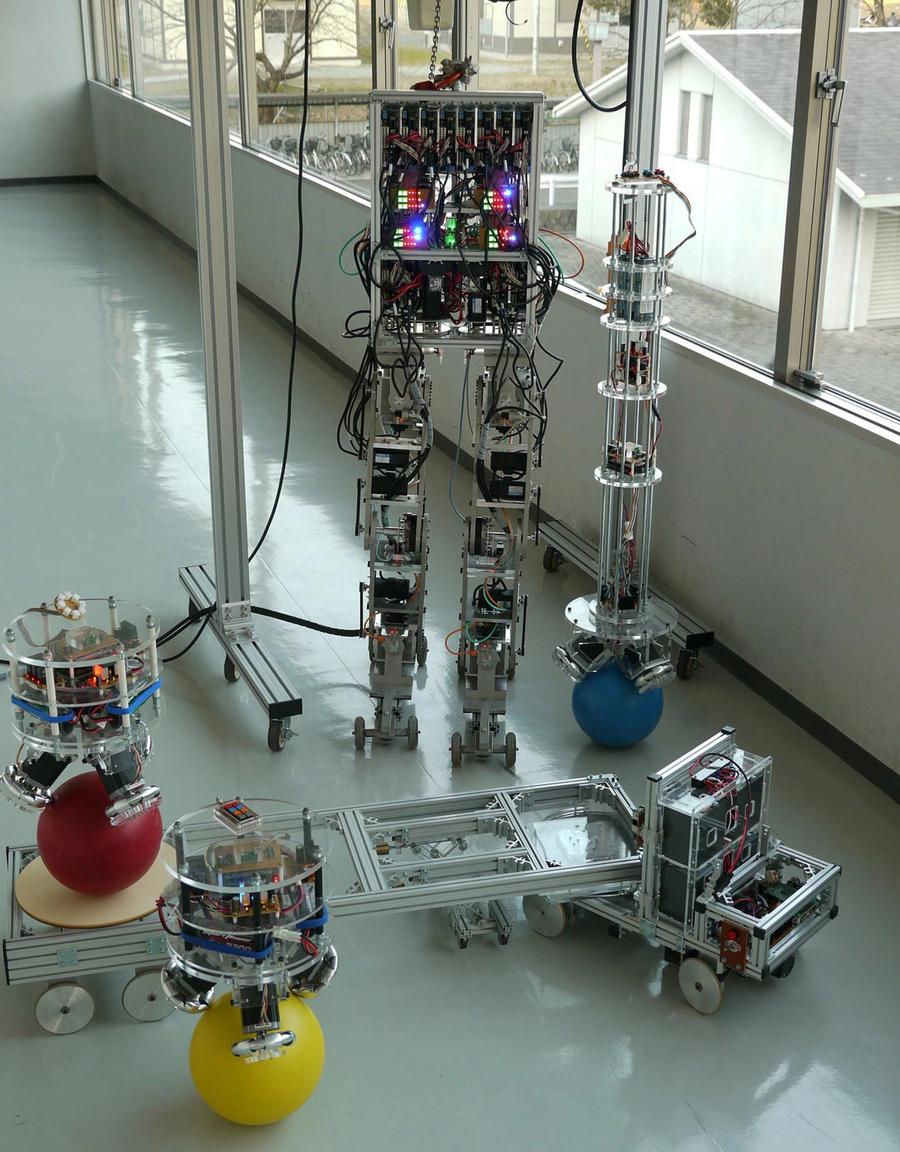
Robot de recherche Ballip Université de Tohoku Gakuin
Ballip est un robot équilibriste, il permet de tenir en équilibre sur une boule et même de porter du poids. Pour arriver à cette prouesse, il utilise seulement 3 moteur pas à pas qui pilotent 3 roues en contact avec le ballon. Une réalisation impressionnante qui laisse largement perplexe.
Contacter Leobotics pour un devis robot de Recherche
Description
Le robot Ballip est conçu par le Dr Masaaki Kumagai, directeur du laboratoire de développement robotique de l’Université de Tohoku Gakuin au Japon, et par un des ses étudiants Takaya Ochiai.
Ce robot, en plus de tenir parfaitement en équilibre sur un ballon, est capable de tenir des charges allant jusqu’à 10 kg, comme un parpaing.

Il dispose de plusieurs mode de fonctionnement :
- L’équilibre pur : Toute les contraintes extérieures sont contrées, et il tend à retourner à sa position initiale tout en restant en équilibre.
- La navigation : A l’aide d’une télécommande, il est possible de le diriger.
- Le suivi autonome : IL accepte les contrainte pour suivre une direction tout en gardant l’équilibre.
Le mode « suivi autonome » est très intéressant car ce robot devient une aide pour déplacer des objets encombrants tout en gardant son équilibre.
Informations complémentaires
| Charge utile (kg) | |
|---|---|
| Type de Navigation | |
| Hauteur (mm) | |
| Largeur (mm) | |
| Profondeur (mm) | |
| Poids (kg) | |
| Vitesse max (km/h) | |
| Capteurs | |
| Nombre d'axes | |
| Motorisations & Transmissions | 3x roues omnidirectionnelles directement couplées à 3x moteurs pas à pas. |
| Couleurs | |
| Crédit Photo | |
| Dernière Mise à Jour | |
| Etat / Production | |
| Fournisseur | |
| Autonomie (h) | |
| Batteries (V / mAh) |
Produits similaires

Robot Ecologie Environnement
Robot Ecologie Environnement et Recherche de IRCCyN RobEcolo industriel en bois



Robot Logistique Stock
Robot à roues recherche logistique déchargement palettes cartons Handle Boston Dynamics
Robot Jouet Educatif
Robot Educatif Makers et Recherche de Mace Robotics Robot MRPiZ mobile programmable



Robot bateau maritime
Robot bateau plateforme compacte recherche éducation Boat-bot Gctronic
