










Robot éducatif à construire et programmer Transbot avec Raspberry Pi 4B 8GB Lidar caméra 3D écran 7″ et bras robotique 3 DOF Yahboom
Le prix initial était : 2.259,00 €.2.039,00 €Le prix actuel est : 2.039,00 €. TTC
Transbot est un robot éducatif sur chenilles développé sur la base du ROS (système d’exploitation du robot). Il utilise Python 3 comme langage de programmation. Et est livré avec des configurations matérielles hautes performances telles que la carte Raspberry Pi 4B, le lidar, la caméra haute définition/caméra de profondeur, etc.,
Description
Caractéristiques :
Conception et service intimes : le châssis a été assemblé avant l’expédition. La carte TF est livrée avec des fichiers système dédiés à Transbot. Il vous suffit d’assembler le Raspberry Pi, l’appareil photo et d’autres pièces, et vous pouvez en profiter rapidement.
Support technique professionnel et service après-vente.
La configuration matérielle stable réalise des fonctions intéressantes :
Basé sur le lidar : évitement des obstacles, suivi, navigation cartographique 2D, navigation multi-robots, etc.
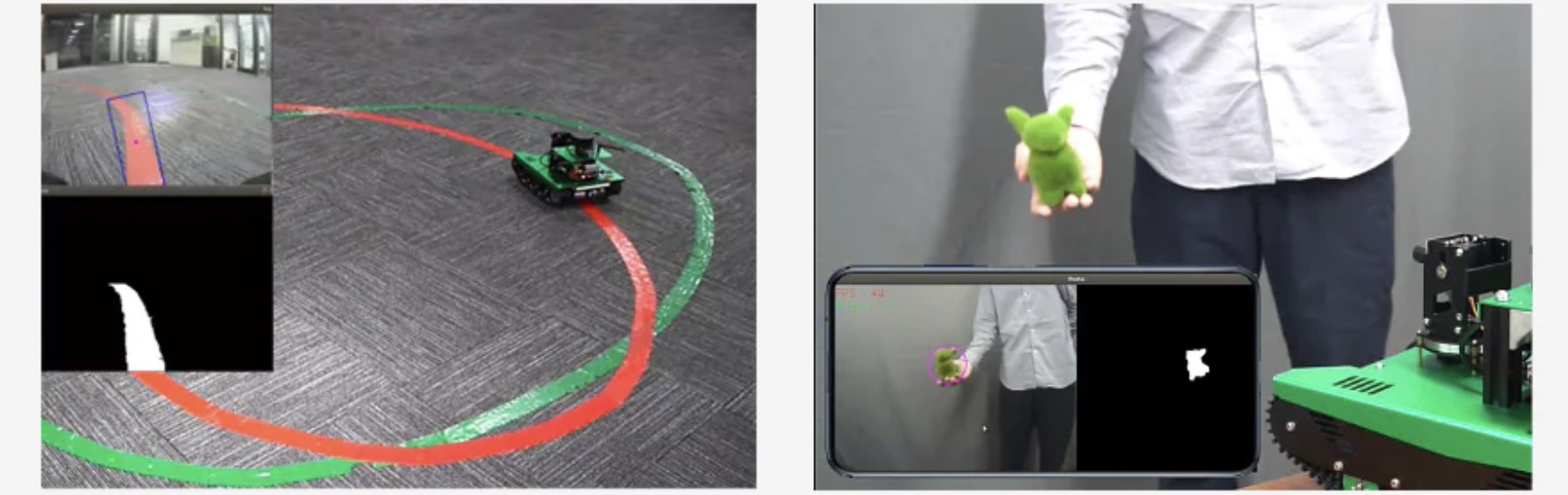
Basé sur la caméra de profondeur : cartographie 3D, traitement d’image en nuage de points, suivi visuel cible KCF, etc.
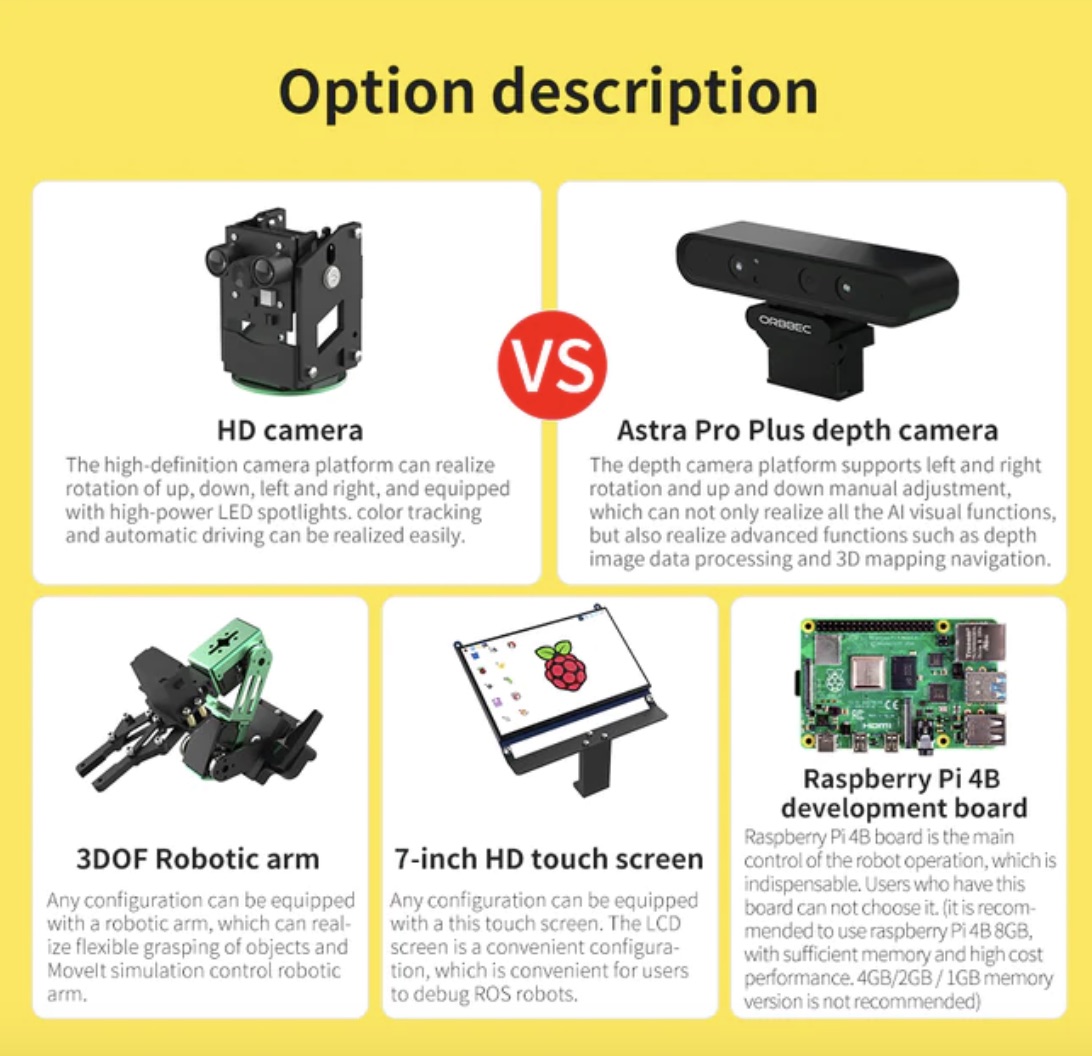
Basé sur une caméra HD : projecteur haute luminosité, 2 rotations flexibles PTZ de 2 DOF.
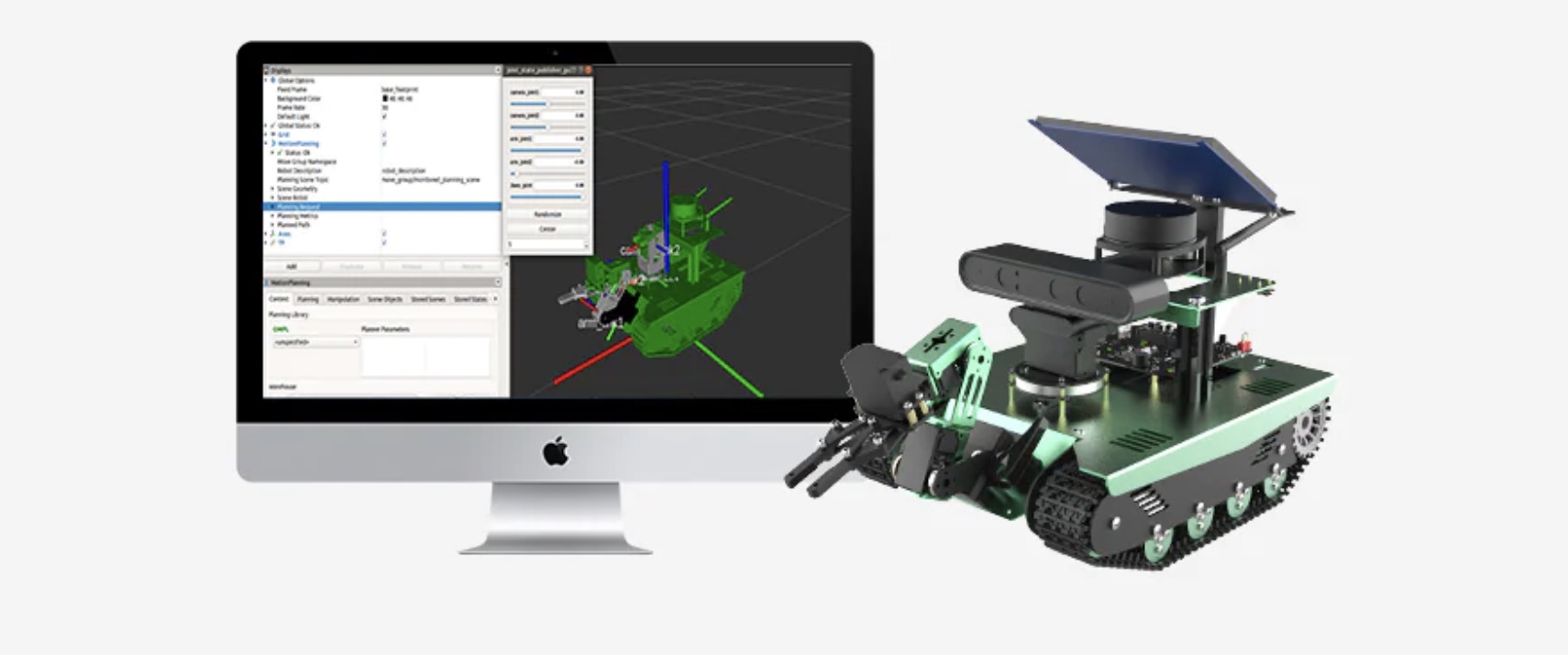
Système d’exploitation ROS : Basé sur le système d’exploitation du robot ROS, nous utilisons intelligemment les boîtes à outils Rviz, Movelt et Qt pour réaliser le contrôle conjoint de la simulation Movelt du bras de robot et de la machine réelle.
Contrôle d’interconnexion multiplateforme : il prend en charge une variété de méthodes de contrôle différentes, l’APP compatible avec l’IA, la télécommande de la poignée visuelle en réalité FPV, la programmation en ligne JupyterLab et le contrôle du système d’exploitation du robot.
![]()
Qu’est-ce que Transbot ?
Transbot est un robot intelligent sur chenilles basé sur le système d’exploitation du robot ROS. Il est équipé de configurations matérielles hautes performances telles que Raspberry Pi 4B, Lidar, caméra HD/caméra de profondeur, etc., qui peuvent réaliser le contrôle de mouvement par robot, la communication à distance, la navigation cartographique, l’évitement des obstacles, la conduite autonome, la simulation de robot Movelt et d’autres applications. De nombreux cours ROS et des vidéos d’enseignement seront fournis, ce qui vous aidera à démarrer facilement avec ROS.
![]()
Basé sur la carte Raspberry Pi 4B
Puissantce de calcul Al et aide les utilisateurs à étendre des fonctions plus complexes.
Description des options
Technologie de navigation
Prise en charge de la technologie de navigation cartographique 3D contenant une vision pure et une fusion radar visuelle. Le robot Transbot peut naviguer et éviter les obstacles sur la carte 3D.
Prise en charge de gmapping, hector, karto, cartographer et d’autres algorithmes pour créer des cartes. Soutenir la planification des chemins, la navigation autonome en un seul point et en plusieurs points.
Suivi visuel du pilote automatique
Prise en charge de la sélection de couleurs personnalisée, le robot peut reconnaître automatiquement la couleur et avancer.
Suivi visuel du pilote automatique
Prise en charge de la sélection de couleurs personnalisée, le robot peut reconnaître automatiquement la couleur et avancer.
Reconnaissance des balises AR
Prise en charge de la détection de suivi dynamique de l’étiquette de code 2D, de l’acquisition de coordonnées de position de posture de code 2D, prise en charge de la reconnaissance de code 2D multiple en même temps.
Augmentation de la réalité augmentée
Sélectionnez les graphiques correspondants via l’APP et laissez les graphiques apparaître sur le papier da daim grâce à la technologie d’amélioration AR.

Informations complémentaires
| Accessoires | |
|---|---|
| Batteries (V / mAh) | |
| Capteurs | Capteur détection d'obstacle, Capteur ID, Détection et suivi des utilisateurs |
| Détails Capteurs | |
| Connexions | |
| Image & Vidéo | |
| Langages de programmation | |
| Types de Batteries | |
| Matériaux | |
| Type de Navigation | |
| Systèmes d'exploitation | |
| Couleurs | |
| Etat / Production | |
| Crédit Photo | |
| Fournisseur | |
| Dernière Mise à Jour |
Produits similaires






Robot Construction Programmation
Robot jouet éducatif construction programmation Cyber Robot Talk Clementoni

Robot Construction Programmation
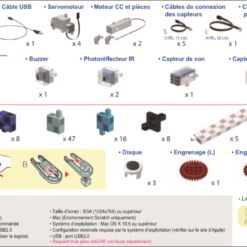
Kit construction programmation robot Arduino primaire Éducation Nationale Ecole Robots Speechi


Robot Construction Programmation
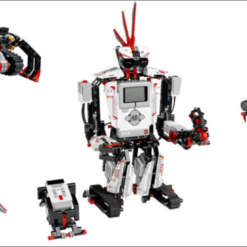
Kit robot construction programmation LEGO Mindstorms EV3 31313


Robot Construction Programmation
Kit construction programmation Robot Voiture intelligente Ecole Robots Speechi