
















Robot de construction et programmation hexapode Hiwonder SpiderPi Pro avec bras robotique AI Vision Raspberry Pi 4B 4 Go
1.349,99 € TTC
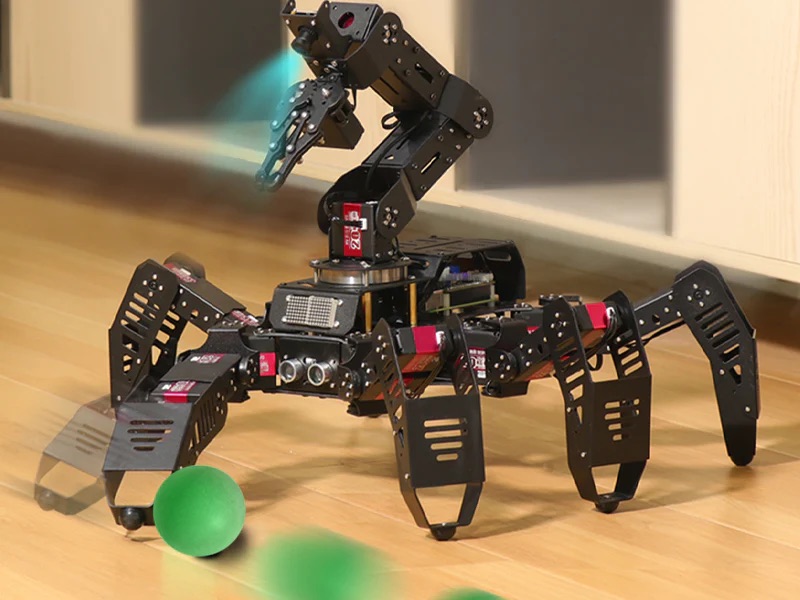
Propulsé par Raspberry Pi 4B 4GB, SpiderPi Pro est un kit de robot hexapode de vision AI mis à niveau sur la base du kit Hiwonder SpiderPi. Un bras robotique de vision y est ajouté et d’autres jeux créatifs d’IA sont étendus, tels que le suivi des cibles, le transporteur intelligent, le ventilateur activé par le visage et le contrôle de groupe.
Description
Combinaison ingénieuse
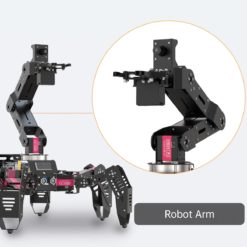
Le bras du robot permet au robot hexapode d’exécuter plus de tâches, par exemple, choisir l’objet cible dans l’espace 3D.
Vue à la première personne : Tri intelligent
La caméra HD est installée à l’extrémité du bras robotique. Cette conception délicate offre une vue à la première personne et étend la plage de rotation de l’appareil photo.

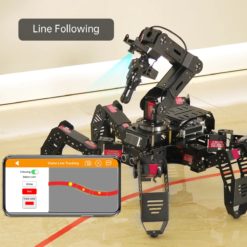
SpiderPi Pro prend OpenCV comme bibliothèque de traitement d’image et utilise FPV pour reconnaître et localiser le bloc cible afin de réaliser le suivi de ligne, le suivi de la cible, la reconnaissance des étiquettes, les coups de pied de balle, la reconnaissance de forme, la détection de visage etc.

Suivi et coups de pied
SpiderPi Pro peut non seulement effectuer le suivi des objets, mais aussi calculer la position relative. Grâce à l’algorithme cinématique inverse, il peut changer de démarche automatiquement pour botter le ballon et bloquer.
Tri et transfert
La position des différents blocs peut être reconnue et la distance peut être jugée. Grâce à l’algorithme cinématique inverse, le bras robotique peut choisir le bloc, puis le transférer indépendamment dans la zone correspondante.

Caméra grand angle HD
La caméra grand angle HD à 120 degrés chargée élargit la gamme de reconnaissance de la vision de SpiderPi Pro. Cet appareil photo prend en charge le réglage manuel de la mise au point.

Informations complémentaires
| Nombre d'axes | |
|---|---|
| Type de Navigation | |
| Capteurs | |
| Connexions | |
| Ecrans | |
| Image & Vidéo | |
| Langages de programmation | |
| Systèmes d'exploitation | |
| Autonomie (h) | |
| Batteries (V / mAh) | |
| Mémoire (Go) | |
| Matériaux | |
| Hauteur (mm) | |
| Largeur (mm) | |
| Profondeur (mm) | |
| Poids (kg) | |
| Couleurs | |
| Etat / Production | |
| Fournisseur | |
| Crédit Photo | |
| Dernière Mise à Jour |
Avis (0)
Seuls les clients connectés ayant acheté ce produit ont la possibilité de laisser un avis.
Produits similaires


Robot Jouet Educatif
Robot éducatif à programmer Create 3 programmation robot aspirateur python c++ ros2 iRobot




Robot Jouet Educatif
Robot éducatif de construction à programmer SPIKE Prime Pack 45678 LEGO®




Robot Jouet Educatif
Robot assistant compagnon surveillance Buddy Pro Blue Frog Robotics


Avis
Il n’y a pas encore d’avis.