
















Robot de construction à programmer bras Hiwonder Jetson Nano inclus avec châssis de roues Mecanum holonomes
1.329,99 € TTC
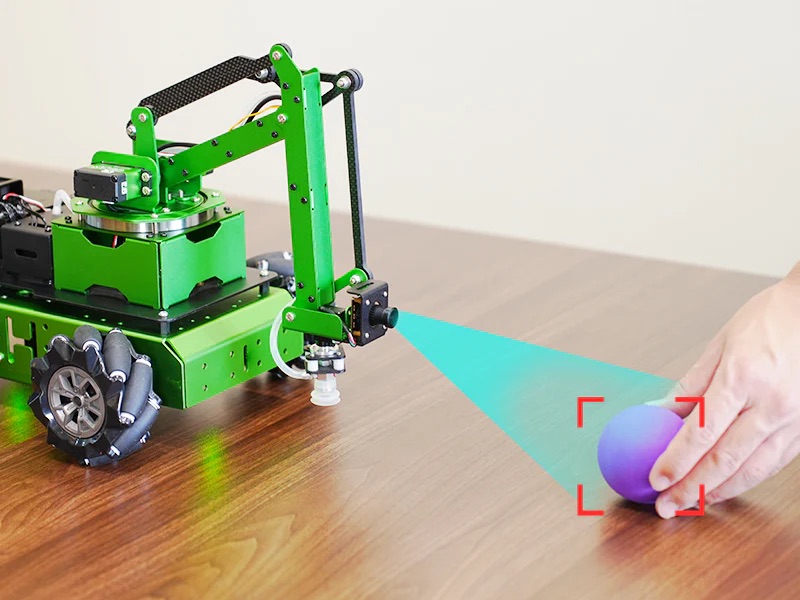
JetMax Pro est un modèle de robot qui est étendu avec un bras de robot de vision AI JetMax. Cette combinaison délicate aide à construire des scénarios intelligents de prélèvement et de transfert. Grâce à l’apprentissage profond et à la vision de l’IA, JetMax Pro peut réaliser le tri des déchets, l’identification des masques, le tri des objets, le contrôle somatosensoriel et de nombreuses autres fonctions d’IA avancées.
Description
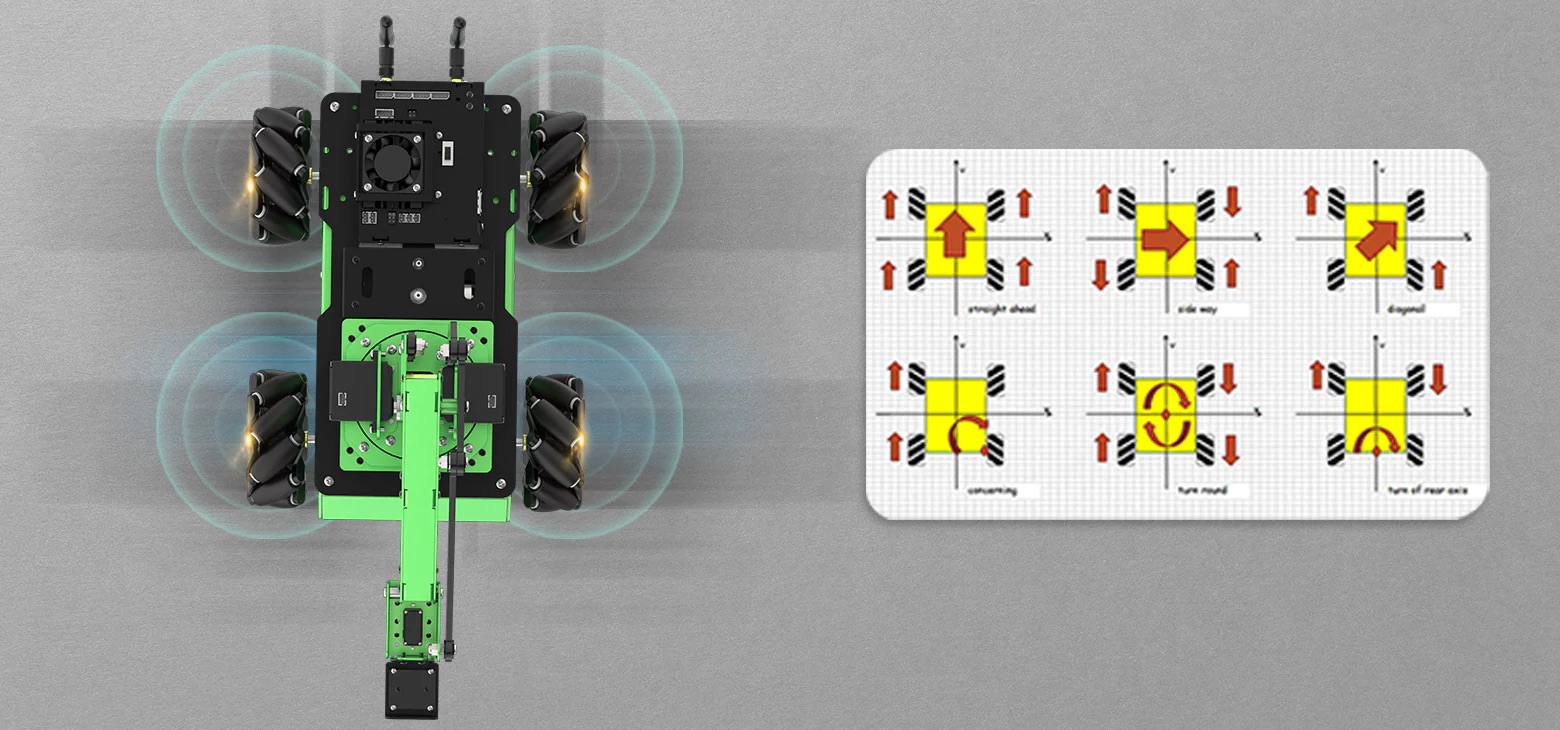
Mouvement omnidirectionnel à 360°
APP et contrôle de la poignée sans fil

Transfert et tri

Contrôle du bout des doigts
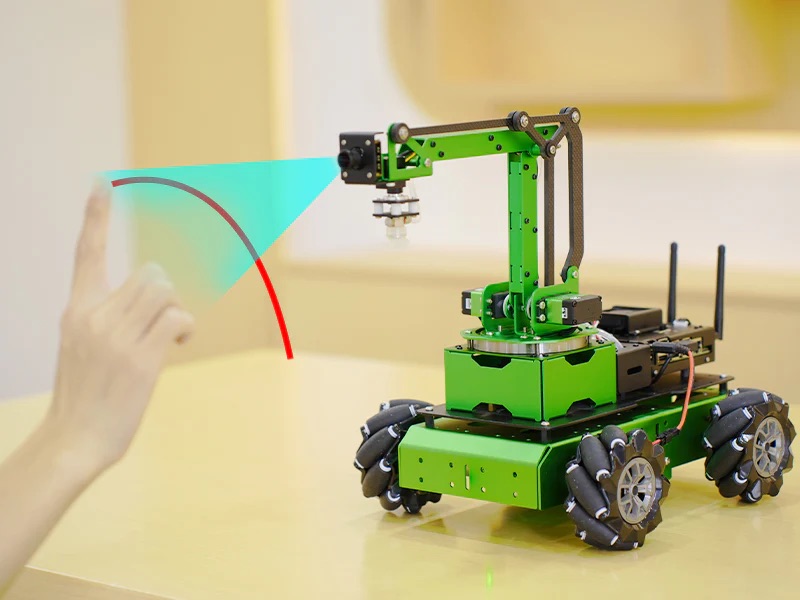
Suivi des cibles
Système d’exploitation du robot ROS
ROS est un méta-système d’exploitation open source pour les robots. Il fournit certains services de base, tels que l’abstraction matérielle, le contrôle des périphériques de bas niveau, la mise en œuvre de fonctionnalités couramment utilisées, le passage de messages entre les processus et la gestion des packages. Et il offre également les outils et les fonctions de bibliothèque nécessaires pour obtenir, compiler, écrire et exécuter du code sur tous les ordinateurs. Il vise à fournir un soutien à la réutilisation du code pour la recherche et le développement en robotique.

Informations complémentaires
| Types de Contrôleurs | |
|---|---|
| Capteurs | |
| Détails Capteurs | |
| Nombre d'axes | |
| Type Outil / Préhenseur | |
| Image & Vidéo | |
| Langages de programmation | |
| Batteries (V / mAh) | |
| Alim. électrique outil (V) | |
| Connexions | |
| Mémoire (Go) | |
| Nombre de roues | |
| Accessoires | 1x Carte Papier, 1x Grande pince, 1x Petit griper, 1x Stylo et support, 3x blocs de couleurs |
| Poids (kg) | |
| Largeur (mm) | |
| Hauteur (mm) | |
| Profondeur (mm) | |
| Couleurs | |
| Etat / Production | |
| Crédit Photo | |
| Fournisseur | |
| Dernière Mise à Jour |
Avis (0)
Seuls les clients connectés ayant acheté ce produit ont la possibilité de laisser un avis.
Produits similaires



Robot Jouet Educatif
Robot assistant compagnon surveillance Buddy Pro Blue Frog Robotics










Avis
Il n’y a pas encore d’avis.