








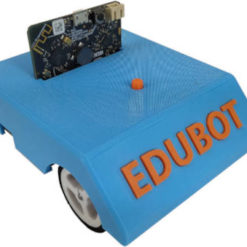

Robot éducatif Edubot Educabot
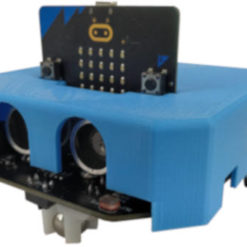
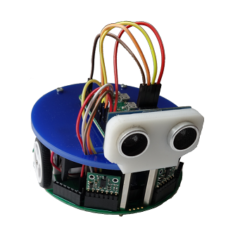
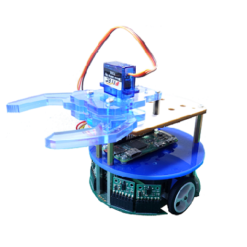
L’Edubot, un robot éducatif innovant, est construit sur une base Freenove qui est commandée par une carte micro:bit (V1 ou V2). Il est équipé de 4 ensembles de 3 LED RGB, 2 moteurs, un buzzer, un capteur à ultrasons, 2 capteurs de luminosité et 3 capteurs infrarouges pour le suivi de ligne. Son alimentation provient d’une batterie rechargeable via micro USB et il est doté d’un bouton marche/arrêt pour une utilisation aisée.
Contacter Leobotics pour un devis robot éducatif
Description
Le robot EduBot par l’intermédiaire de sa carte micro:bit est programmable à partir de l’interface Microsoft MakeCode App – Micro:bit. Les deux versions Online ou Offline sont utilisables indifféremment et très similaires. La programmation se fait par blocs textuels ou en langage python avec la possibilité de voir en python ce qui a été programmé en blocs et inversement.
Spécificités des capteurs du robot éducatif EduBot
Capteur à ultrason
Le module ultrasonique mesure la distance entre le Robot et un obstacle qui se trouve devant lui. Par conséquent, on peut programmer le robot pour qu’il évite les obstacles. Les valeurs renvoyées par le capteur varient entre 0 et 240.
Capteur de luminosité
Le robot possède deux capteurs d’intensité lumineuse, en se basant sur la différence entre les valeurs des deux capteurs on peut savoir quel capteur reçoit la lumière la plus intense. On peut ainsi programmer le robot pour qu’il suive ou évite la lumière.
La valeur de « traçage » de la lumière β est générée conjointement par les deux capteurs et sa plage varie entre 0 et 1023.
- Les intensités lumineuses détectées par deux capteurs sont égales β = 512 (ou valeur approchante)
- L’intensité lumineuse détectée par le capteur de droite est plus forte que celle de gauche β > 512
- L’intensité lumineuse détectée par le capteur de gauche est plus forte que celle de droite β < 512

Informations complémentaires
| Capteurs | Accéléromètre, Capteur de distance ultrasons, Capteur de lumière, Suiveur de ligne |
|---|---|
| Connexions | |
| Fonctions de Sécurité | |
| Motorisations | |
| Langages de programmation | |
| Nombre d'axes | |
| Nombre de roues | |
| Voyants lumineux | |
| Audio | |
| Couleurs | |
| Etat / Production | |
| Crédit Photo | |
| Fournisseur | |
| Dernière Mise à Jour |
Produits similaires



Robot Jouet Educatif
Robot Educatif Makers et Recherche de Mace Robotics Robot MRPiZ mobile programmable







