









Description
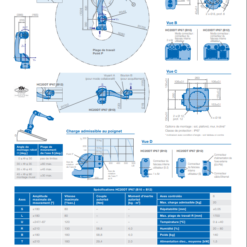
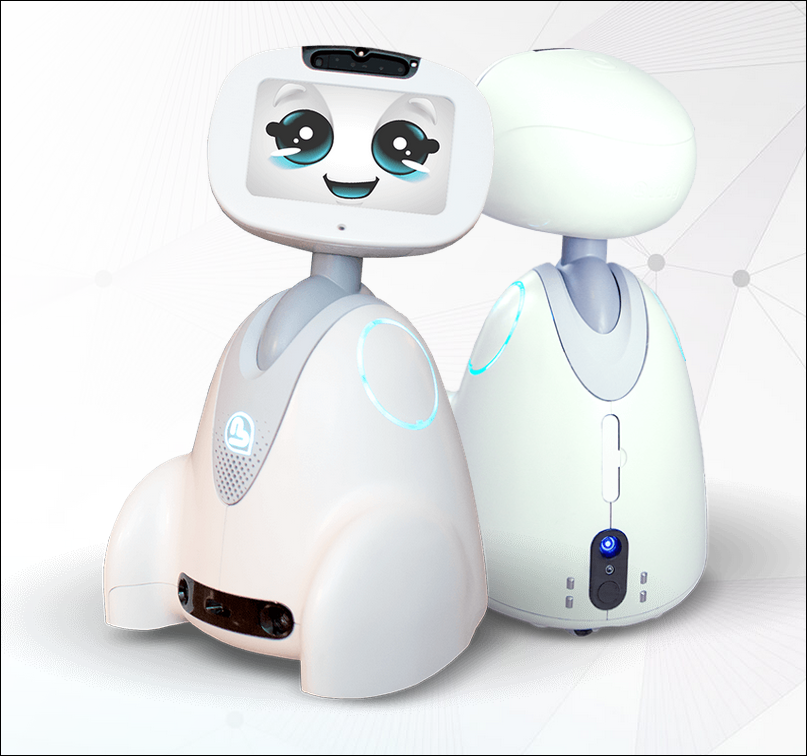
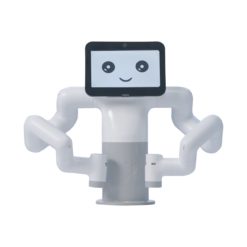
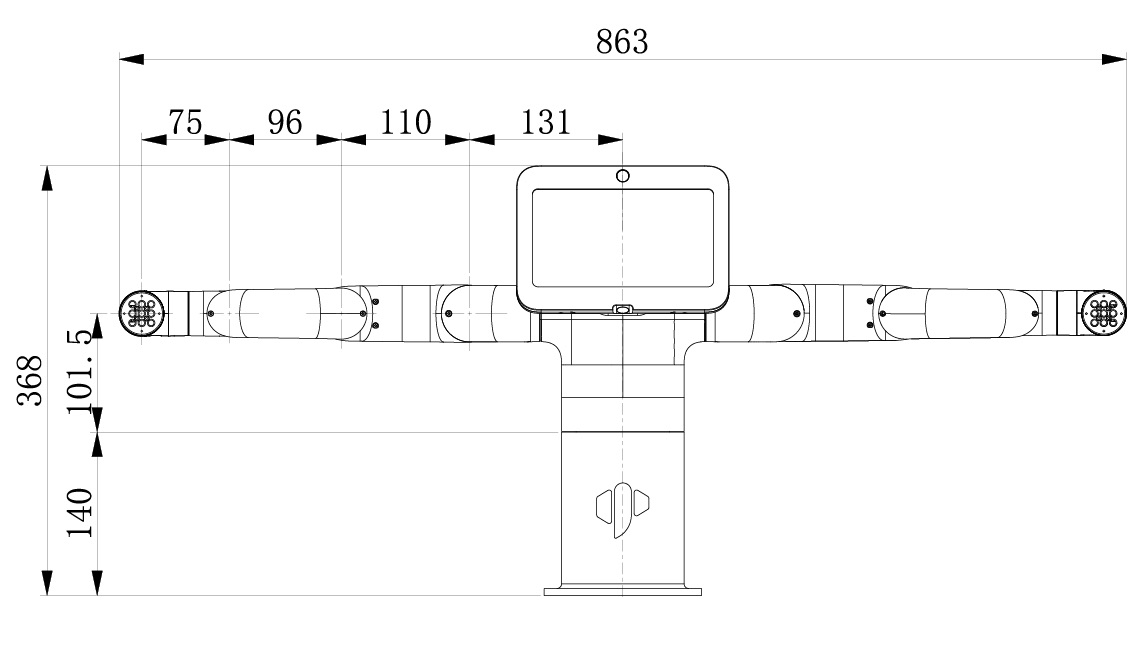
Le rayon de travail d’un seul bras de myBuddy est de 280 mm et la charge utile maximale est de 250 g. Il possède un écran d’affichage interactif de 7 pouces et deux caméras HD de 2 millions de pixels, et fournit les ports d’E/S de 3,3 V et les ports Lego. myBuddy peut fonctionner avec plusieurs accessoires tels que la pompe d’aspiration, les poignées, etc. Il peut répondre aux besoins de différentes applications.

ROBOT D’ENSEIGNEMENT DE LA RECHERCHE OPEN SOURCE
Toute la bibliothèque de lecteurs de contrôle de mouvement de la machine de myBuddy est ouverte, plus de 100 interfaces de contrôle telles que le contrôle des anges conjoints, le contrôle des coordonnées, etc. Par conséquent, les utilisateurs peuvent réaliser la recherche sur l’algorithme de planification du cheminement des robots, la recherche sur l’algorithme d’évitement des interférences à deux bras, l’apprentissage de la vision des robots et le développement d’autres applications d’intelligence artificielle. myBuddy aide efficacement les développeurs et les étudiants à améliorer leur capacité personnelle de recherche scientifique.

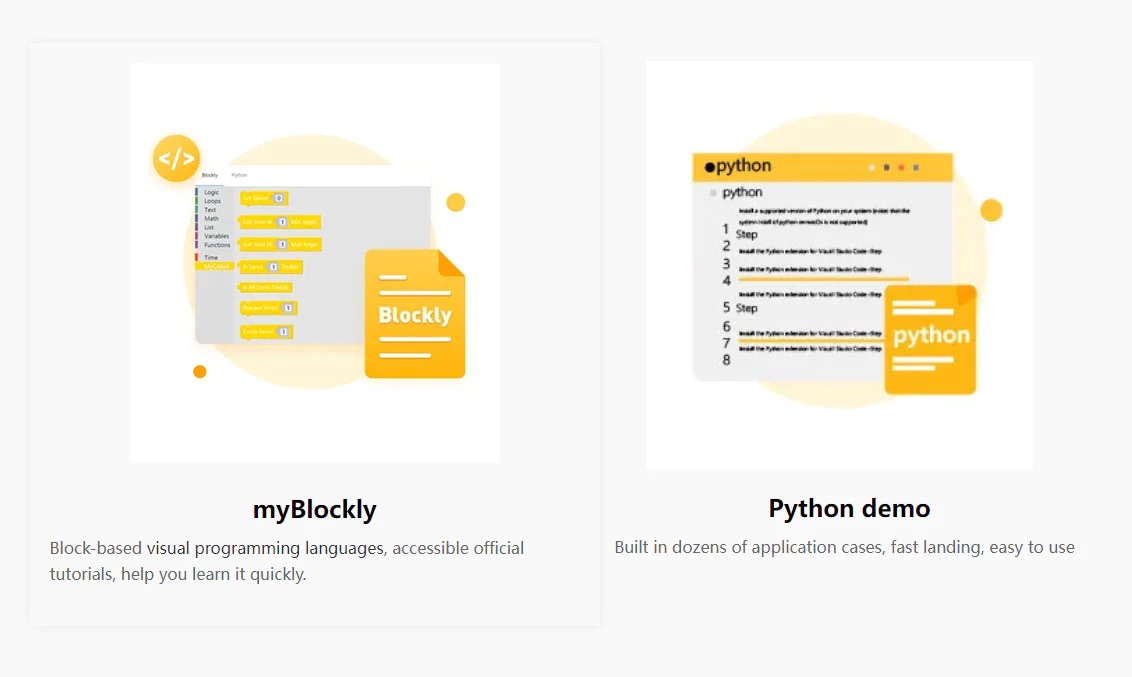
Environnement de développement visuel
- Il peut réaliser l’apprentissage et l’enseignement de la compréhension de l’intelligence artificielle. Interface standard de la caméra à intelligence artificielle. La caméra à 45 degrés ci-dessous prend en charge le positionnement de l’emplacement de la zone, la reconnaissance des objets et des codes QR. Un autre appareil photo peut atteindre la reconnaissance du visage et du corps.

Voyage créatif pour les joueurs de robots
- Ouvrez l’interface de contrôle inférieure. La valeur potentielle, les angles, les coordonnées, les vitesses de fonctionnement et les autres interfaces peuvent être contrôlés librement. Il peut réaliser la recherche d’application des robots à deux bras, la planification de la trajectoire de mouvement, le développement de l’action et la reconnaissance visuelle. Une variété d’interfaces peut répondre aux multiples applications à des fins commerciales et éducatives.
Application d’apprentissage ROS
- L’environnement de développement ROS intégré au système robotique, il fournit une variété de cas dans le RVIZ et MOVEIT, tels que le suivi mobile, le contrôle des curseurs, la planification de chemin et d’autres applications avancées. Les documents de configuration du robot URDF sont ouverts, de sorte que les utilisateurs peuvent effectuer un développement de modifications secondaires.
EXCELLENTS CONFIGURATIONS
Interface électrique industrialisée 24V, pour compléter vos besoins de développement de scène industrielle, interaction clé, affichage de l’écran, interface PLC, vous permettant de construire rapidement et en toute sécurité des scénarios d’exploration d’applications de bras robotiques.
Basé sur différents types d’applications, open-source à ses interfaces et permet d’obtenir la reconnaissance d’objets, la reconnaissance faciale, la reconnaissance d’images, etc.
Informations complémentaires
| Nombre d'axes | |
|---|---|
| Accessoires | |
| Capteurs | |
| Connexions | |
| Langages de programmation | Arduino, C#, C++, JavaScript, Python, Raspberry PI, Robot Operating System (ROS) |
| Charge utile (kg) | |
| Rayon de braquage (mm) | |
| Ecrans | |
| Image & Vidéo | |
| Voyants lumineux | |
| Systèmes d'exploitation | |
| Hauteur (mm) | |
| Largeur (mm) | |
| Couleurs | |
| Etat / Production | |
| Crédit Photo | |
| Fournisseur | |
| Dernière Mise à Jour |
Produits similaires



Robot Collaboratif - Cobot
Bras robot collaboratif cobot 6 axes ultra performant UR30 Universal Robots

Robot Collaboratif - Cobot
Biomimétisme robot pneumatique collaboratif BionicSoftArm Festo, construction légère modulaire